- Aleksandrov A.Yu., Fradkov A.L., Semenov A.D. Delayed and Switched Control of Formations on a Line Segment: Delays and Switches Do Not Matter, IEEE Trans. Autom. Control, Published online: 24 May 2019. DOI
- А.Л.Фрадков "Киберфизические системы: идеи и перспективы" - пленарный доклад на Всероссийском совещании по проблемам управления (ВСПУ-2019) , ИПУ РАН, Москва, 17 июня 2019 г. (презентация доклада, видеозапись выступления)
- Amelin, K.S., Andrievsky, B.R., Tomashevich, S.I., Fradkov, A.L. Data Exchange with Adaptive Coding between Quadrotors in a Formation Automation and Remote Control, 2019, 80(1), с. 150-163. DOI
- V. A. Bondarko, A. L. Fradkov (2018) Adaptive stabilisation of discrete LTI plant with bounded disturbances via finite capacity channel, International Journal of Control, 91:11, 2451-2459, DOI
- Tomashevich S.I. Andrievsky B.R., Fradkov A.L. Formation Control of a Group of Unmanned Aerial Vehicles with Data Exchange Over a Packet Erasure Channel. Proc. 1st IEEE Conf. Ind. Cyber-Physical Systems, 2018. DOI
- M.S.Ananyevskiy, A.L.Fradkov Control over Internet of Oscillations for Group of Pendulums. In: Dynamics and Control of Advanced Structures and Machines Eds. H.Irschik, A.Belyaev, M.Krommer. Springer, Switzerland, 2017, pp.205-213. DOI
- Fradkov A.L. Horizons of Cybernetical Physics. Philosophical Transactions of the Royal Society A., 2017, vol:375, iss:2088 pp.1-19. DOI
- Amelina, N., Fradkov, A., Jiang, Y., Vergados, D. Approximate Consensus in Stochastic Networks with Application to Load Balancing. IEEE Transactions on Information Theory, V.61 Is.4, pp.1739-1752, 2015. DOI
- Fradkov A.L., Andrievsky B., Ananyevskiy M.S. Passification based synchronization of nonlinear systems under communication constraints and bounded disturbances. Automatica, V. 55 (5), 2015, pp. 287-293 DOI
Об отделении
Руководитель: д.т.н., профессор А.Л. Фрадков
Описание: В отделении ведутся работы по созданию и исследованию интеллектуальных многоагентных систем управления на основе принципов адаптации и обучения при коммуникационных и транспортных ограничениях. Разработаны и обоснованы алгоритмы достижения консенсуса в многоагентных системах на основе пассификации и скоростного градиента. Разработаны алгоритмы адаптивного управления сетью квадрокоптеров. Ведутся разработки принципов построения комбинированных интеллектуальных кибер-физических систем, опирающихся на непрерывные жидкостные модели динамики роя автономных 2D и 3D мобильных роботов и современные адаптивно-робастные алгоритмы управления на основе нейросетевых моделей. Их применение позволит существенно сократить трудоемкость вычислений при сохранении точности управления. Разработан и введен в эксплуатацию экспериментальный комплекс КвадРой-1 для изучения, исследования и управления многоагентным групповым взаимодействием автономных подвижных роботов.

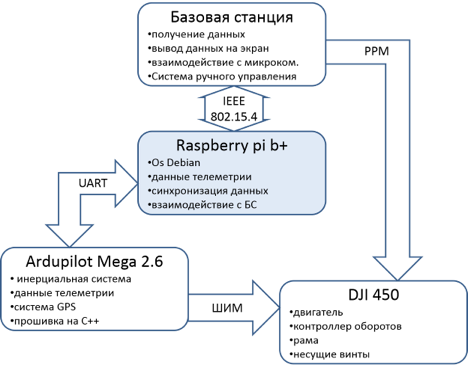
Экспериментальный комплекс КвадРой-1 имеет в своем составе четыре квадрокоптера, управляющий компьютер оператора, пульты оператора для управления квадрокоптерами, зарядные устройства и вспомогательное обрудование. Кадрокоптеры комплекса могут управляться: оператором вручную, автономно по введенной программе, по радиоканалу от компьютера оператора, а также децентрализованно с использованием радиоканала для взаимного обмена информацией и/или передачи информации от компьютера оператора к ведущему квадрокоптеру ("лидеру группы"). Последний режим является основным, и обеспечивает уникальность комплекса как средства для разработки, отладки и тестирования систем децентрализованного управления групповым движением мобильных роботов через сети связи.